Team 1: Hermes - The god of swiftness
People
- Lane Brooks: Electrical Engineering Junior
- Keith Fife: Electrical Engineering Meng
Strategy
Our strategy was to be the fastest and simplest
robot. We actually turned into the most violent and aggressive robot
as well. As soon as the starting light signaled, our robot pivoted
to get oriented, backed into the wall, turned down the high
road, and shoveled all the negative balls into our opponents bin.
Then we backed out of the bin, turned, and went over to other side of
the table to block any robots that might be trying to come back up
their ramp to dump positive balls into their own bin.
Our design goal from the beginning was to keep it simple, but our
first prototype was far from that. It had an arm and a front end ball
loader. The first day that we tried it on the table, it was a huge
failure, so we quickly scrapped it and in 5 minutes had built a robot
that was very similar to our final design.
Design
- Steering and Driving: We steer with a wheel that is mounted
on a servo on the front of the machine. We pivot by turning the front
wheel and then driving the rear wheels differentially. The reason
that we used a servo on the front wheel instead of using a coaster
wheel was for wall following. To drive forward, we would put the
front wheel at a slight angle into the wall and both rear wheels on full
power. The slight angle of the front wheel pushes us into the wall
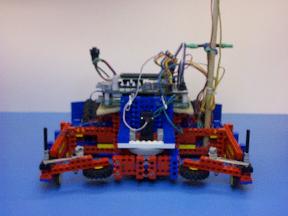
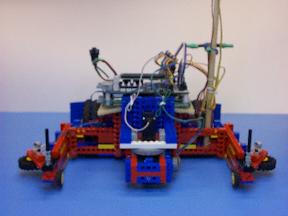
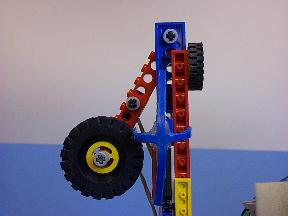
and guarantees that we are going straight. We then put arms with
wheels on the side of the robot to make for easy gliding down the
wall. The arms start with the wheels inside the machine. When the
servo turns the front wheel, the arms spring out as shown below.
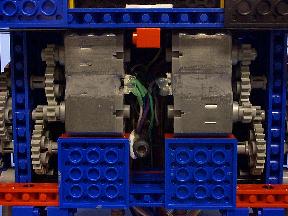
- Speed And Accuracy: In order to obtain speed, we
put 4 motors on each wheel. As a result we were the fastest robot out there.
In order to obtain precision pivots and turns, we
used a modified potentiometer on the front wheel. We removed the stop
on the pot and then in software counted how far it turned. This was
necessary because the board was not able to keep an accurate count
using shaft encoders at the speed we were going.
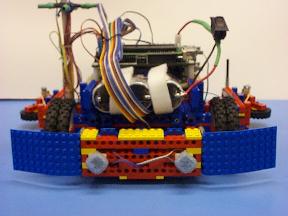
- Sensing: We used two switch sensors for feedback. One was
on the rear bumper to tell us when we had backed into the wall, and
the other was on the underside of the front end scoop to tell us when
we had driven into our opponents scoring bin.
- Controller: We used a modified version of the original
controller board. The ports allow for 6 volt bidirectional motor drive.

Results
We won first place in the tournament after going
undefeated. We had a collision during every round, and we never lost
a single piece off of our machine. The other robots, however, did not
fair so well. We went against several robots that had arms, and we
demolished those arms. We also met several other robots at their
scoring bin and pushed them into the bin and then proceeding to bash
them.
 The 6.270 Page
The 6.270 Page